Éste es el método más fácil de
alimentación
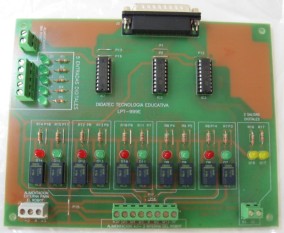
de la placa, ya que las tensiones de funcionamiento de los motores son
precisamente +3V/-3V, resultando su funcionamiento muy intuitivo. El
resto de entradas y salidas se manejan de forma sencilla, (similar a
cuando se usa la alimentación de 5V).
Se necesitan los siguientes componentes:
|
|
NOTA: Si no se dispone de fuente de alimentación o convertidor, puede usarse 4 pilas de 1,5 V de cierta potencia (recomendable las del tipo "D" o LR-20, es decir las más gruesas de 1,5V). La conexión sería como aparece en la imagen. Esta es la que se usa cuando se conecta a la Placa el brazo robot, que lleva las baterías dentro, aunque este asunto se verá en otro capítulo. |
 |
|
|
|