Utilización de entradas y salidas: |
|
|
Estudiaremos ahora las salidas de relé, diseñadas para conectar motores. |
|
SALIDAS DE RELÉ |
|
|
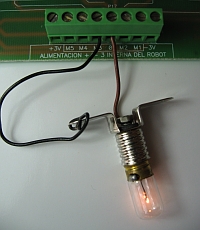
Estas salidas pueden proporcionar tensiones de +3V, 0V ó -3V. Gracias al cambio de polaridad (+/- 3V) que se obtiene en estas salidas, puede conseguirse que un motor conectado a ellas cambie de sentido de giro. Por eso estas salidas suelen utilizarse para conectar motores. También puede usarse cualquier otro receptor, por ejemplo una bombilla, aunque en este caso es indiferente la polaridad. En la placa estas salidas están situadas en el conector de 8 tomas junto al que aparece escrito: "ALIMENTACIÓN +/- 3 INTERNA DEL ROBOT" |
|
|
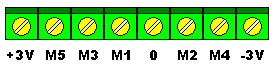
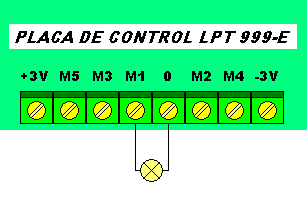
46 - Examina el conector de 8 tomas. Este elemento contiene salidas para motor, rotuladas como M1, M2, M3, M4 y M5. También dispone de tomas de corriente de +3V/0/-3V que usaremos para alimentar los motores y demás elementos que conectemos a las salidas. |
 |
|
CUIDADO: La rotulación que aparece no es la correcta pues la salida de los motores M1, M3 y M4 está situada en otra posición. El orden correcto es el que aparece en la figura de la derecha. |
 |
|
47 - La forma de emplear estas salidas para que el motor pueda funcionar en un sentido y en el contrario es la siguiente: |
|
|
Se conecta uno de los bornes del motor a la salida de
motor deseada (M1
en el ejemplo) y el otro se conecta a la toma de 0V.  |
  |
PROGRAMACIÓN DE LAS SALIDAS DE RELÉ |
|
|
48 - Inicia un nuevo programa |
|
|
49 - Pulsa el botón En el menú que aparece escoge la salida a la que has
conectado
el motor: (M1) en este caso. |
 |
|
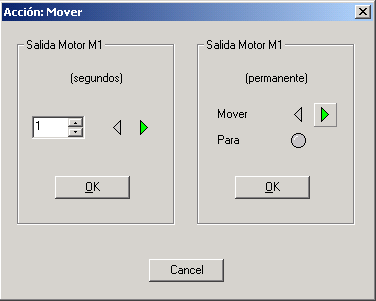
50 - Aparece la ventana "Acción: Mover" con varias opciones para aplicar a la salida escogida: - Mover a la izquierda/derecha durante X segundos (máximo 120) - Mover a la izquierda/derecha de forma permanente o bien Parar el motor. En cada caso habrá que pulsar las flechas Si escogemos "Parar" es indiferente que usemos la flecha izquierda o la derecha. |
 |
|
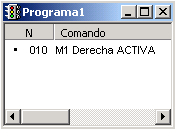
En principio escogeremos mover a la derecha de forma permanente, con lo cual nos aparece una línea en el programa como la siguiente: |
 |
|
NOTA: El motor se
moverá efectivamente
hacia la derecha o la izquierda dependiendo de cómo se hayan
conectado los cables. |
|
|
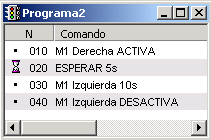
51 - Continúa añadiendo líneas al programa y ordénalas hasta obtener un programa como el siguiente: |
 |
|
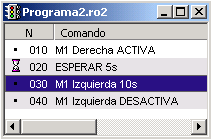
52 - El tiempo que está girando el motor
a la izquierda es demasiado largo. Vamos a cambiarlo: selecciona la
orden Número 030 y pulsa el botón |
 |
|
53 - Verás que aparece de nuevo la
ventana "Acción: Mover" en la que marcaremos que el motor M1
se mueva a la izquierda durante 5seg. El programa quedará entonces como aparece a la derecha: |
 |
|
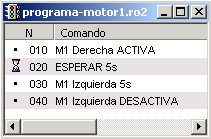
54 - Guarda el programa con el nombre programa-motor1 |
|
|
55 - Ejecuta completo el programa-motor1 para
comprobar su
funcionamiento. Realiza también su diagrama de flujo. |
|
PROPUESTA 4: Simplificación de la espera
|
|
|
56 - Analiza el programa-motor1 y trata de lograr el mismo
efecto con sólo 3 líneas de programa. Una vez que
hayas hecho el cambio guárdalo con el nombre programa-motor2
y
dibuja su diagrama de flujo. |
|
OTROS RECEPTORES EN LAS SALIDAS DE RELÉ |
|
|
Se puede conectar cualquier otro tipo de receptor (lámparas, timbres, resistencias... ) en las salidas de relé (siempre que se correspondan con la tensión y la intensidad que proporciona la placa). Si a los receptores no les afecta la polaridad, no se
notará ninguna diferencia entre aplicarles +3V y -3V. En la fotografía se aprecia que la bombilla luce menos
que
cuando se conectaba a la salida S1. Esto ocurre porque la
tensión aplicada en estas salidas es de 3V, en cambio en las
salidas S1 y S2 es de 6V (tensión total desde -3V hasta +3V). |
|
 |
 |
PROPUESTA 5: Intermitencia doble |
|
|
57 - Diseña un programa en el que utilices un motor y dos bombillas conectadas como en la figura. Debe funcionar de la forma siguiente:
|
 |
|
58 - Guarda el programa con el nombre intemitencia-doble.
Realiza también su diagrama de flujo. |
|
| |
|
|