
 |
 |

 |
RETO 15
|
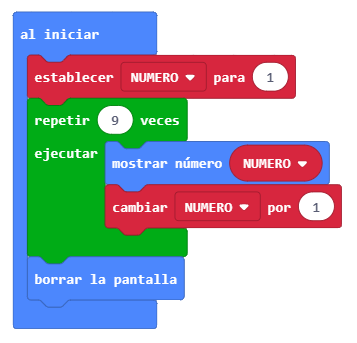
| Modifica el programa
anterior para que cuente hacia atrás,
desde 9 hasta 0 |
 |
| NOTA: Para que la brújula
funcione adecuadamente la placa tiene que estar en posición horizontal |
RETO 16
|
Realiza un programa
con las condiciones siguientes:
|
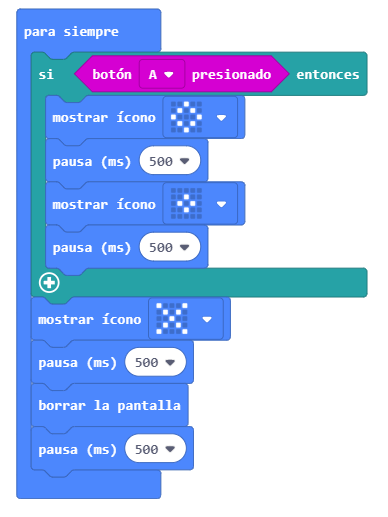
| USANDO
UN CONDICIONAL |
 |
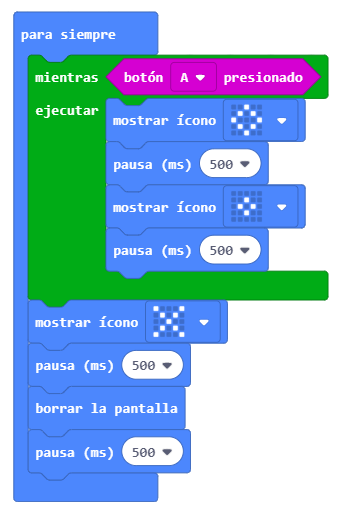
| USANDO UN BUCLE |
 |
RETO 17
|
Crea un programa en
el que:
|
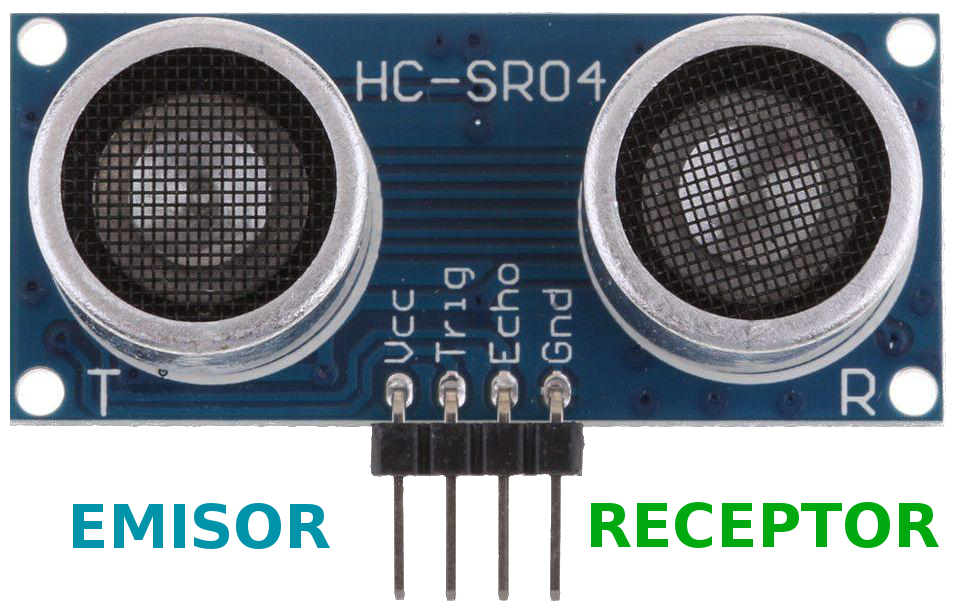
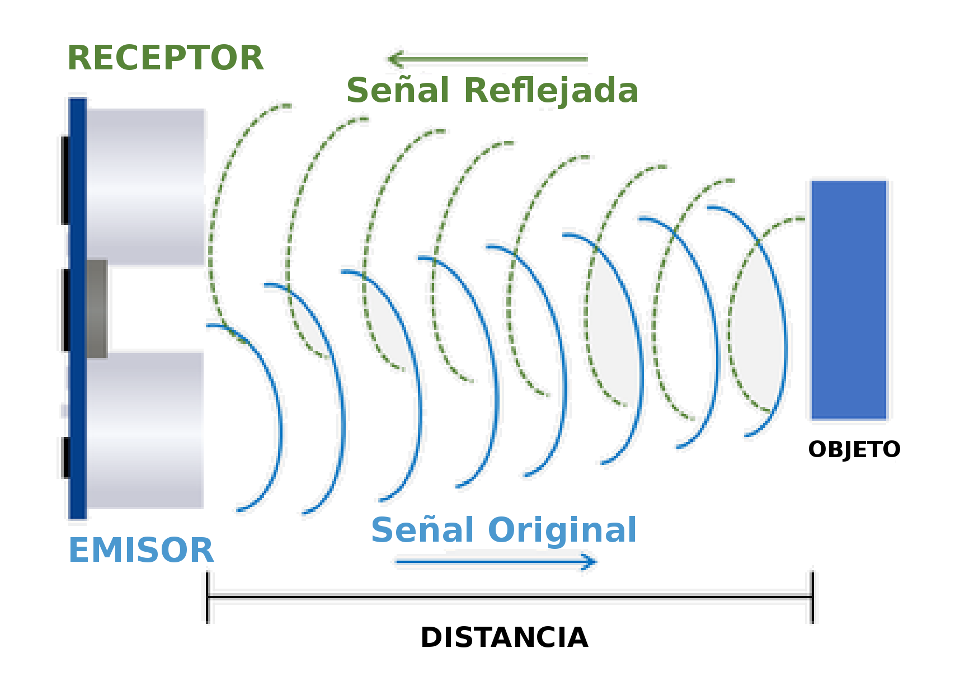
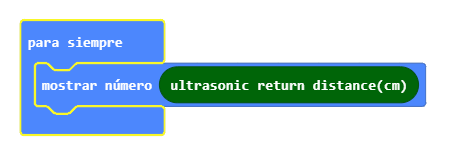
 existe uno que nos proporciona
el Valor de la Distancia en cm:
existe uno que nos proporciona
el Valor de la Distancia en cm: 
 |
 (Imagen: DFRobot - Robot Maqueen) |


 |
RETO 18
|
Amplía el programa
anterior para conseguir lo siguiente:
|
RETO 19MÁS AVANZADO |
Modifica el programa
anterior para conseguir lo siguiente:
 (Imagen: DFRobot - Robot Maqueen) PISTA: El problema de usar un sentido aleatorio es que el coche cambia de dirección si se está leyendo continuamente la orden que produce este efecto. Para evitarlo utiliza un "Bucle" del tipo "Mientras..." para que se ejecute la orden de rotación durante todo el tiempo que se cumpla una condición, dejando fuera del bucle las órdenes que hacen que cambie el sentido 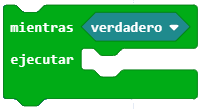 |
| BLANCO | y el |
NEGRO |
se
accede a un bloque que proporciona el valor de cada sensor: izquierdo o
derecho: y que distingue entre el
color BLANCO/NEGRO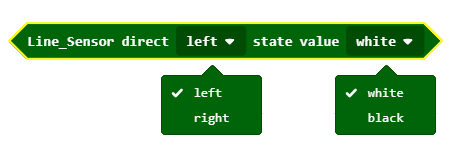
 |
RETO 20
|
Modifica el programa
anterior para que el DGCat actúe de la forma siguiente:
|
|
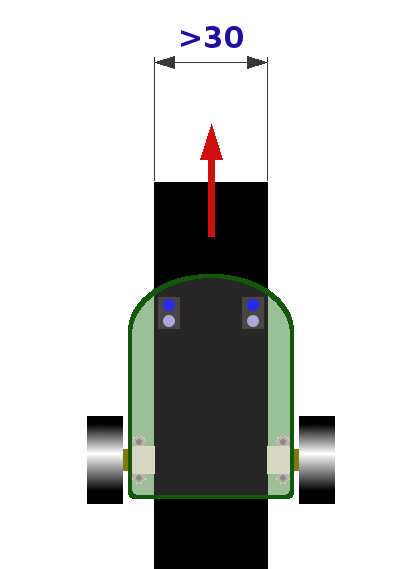
LÍNEA
GRUESA Ambos sensores quedan dentro de la línea NEGRA. Esta será la posición para que el coche AVANCE |
 |
|
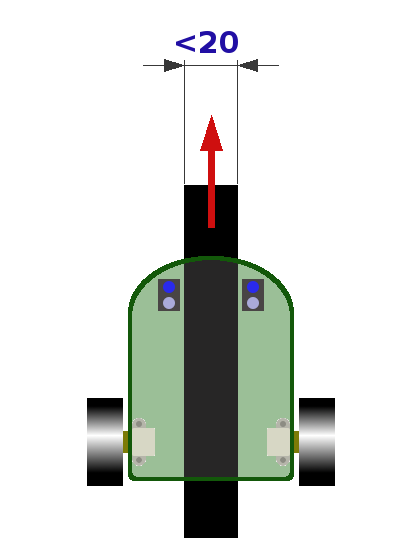
LÍNEA
FINA El grosor de la línea es de 20mm o menos. |
 |

 |
RETO 21
|
| SEGUIDOR DE LINEA
NEGRA FINA |
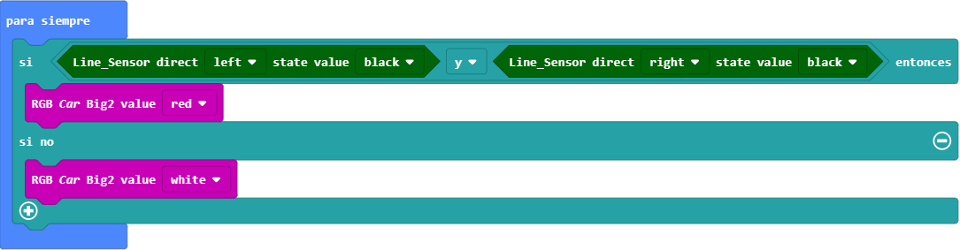
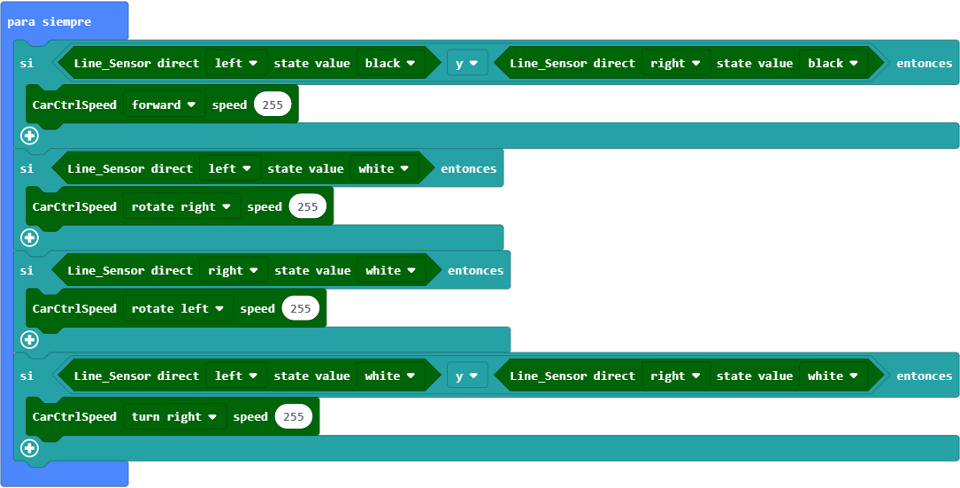
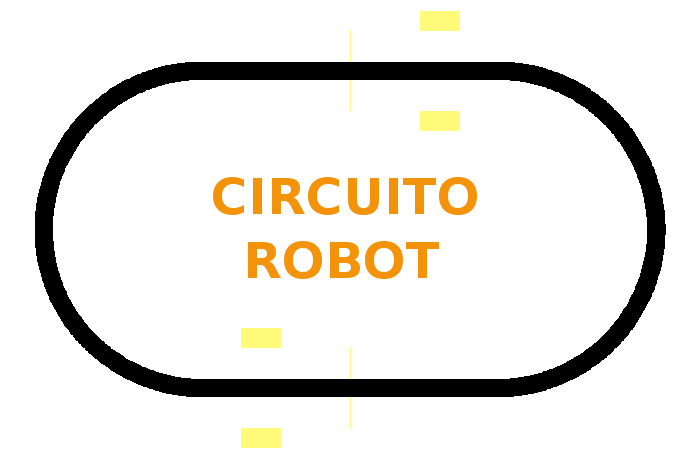
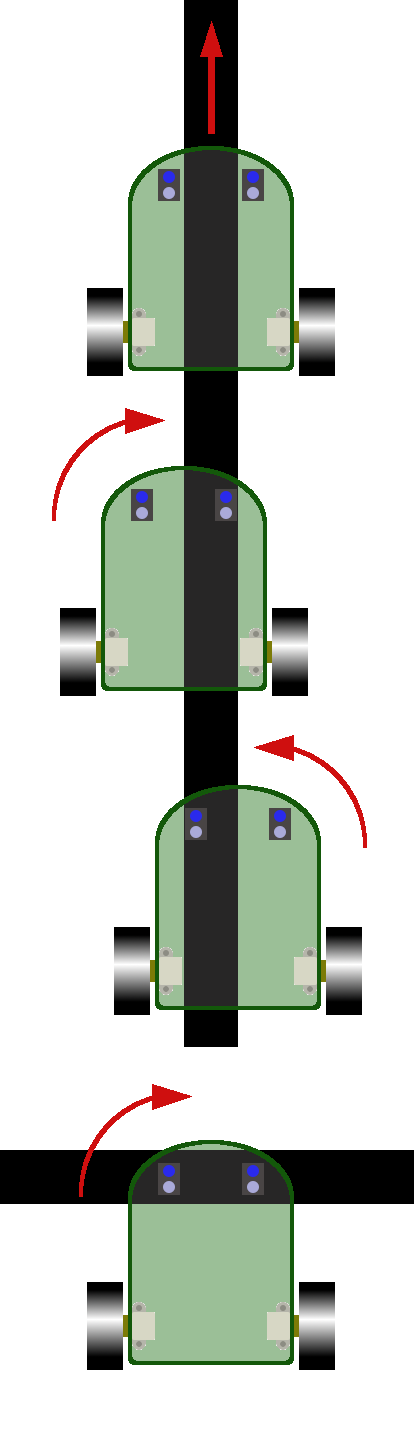
| Realiza los cambios
necesarios al programa anterior para conseguir que el Robot DGCat siga
una línea negra FINA utilizando el mapa incorporado en la caja. Para ayudarte, fíjate en las indicaciones del diagrama anterior Para comprobar su funcionamiento sitúa el robot en una POSICIÓN CENTRADA en la LINEA NEGRA. Pruébalo en ambos sentidos  Para lograrlo puedes modificar los bloques y también sus variables, como la velocidad o el tipo de giro |
RETO 22MÁS AVANZADO |
| LÍMITE DE LÍNEA NEGRA |
| Modifica el programa
anterior para conseguir que el Robot DGCat se
mueva POR EL INTERIOR DEL MAPA, SIN SALIRSE DEL BORDE MARCADO POR LA
LÍNEA NEGRA Para demostrar su correcto funcionamiento prueba el programa colocando el robot en EL INTERIOR DEL MAPA, sin tocar la línea negra. Comprueba que funciona en ambos sentidos  Para conseguirlo puedes modificar los bloques y sus variables como la velocidad o el tipo de giro |
 |
|
|