9. COCHE DG-CAT
9.1 CARACTERÍSTICAS DEL DG-CAT
Gracias a los 25 PINES de que dispone
micro:bit puede ampliarse su potencial si se le
acopla otras placas o sensores.
Es el caso de DG-Cat, un chasis Robot que consiste
en una placa con sensores y actuadores, compatible con micro:bit, y que
incluye motores para poder desplazarse autónomamente.
DG-Cat dispone, entre otros, de los siguientes
elementos:
-
2 LEDs RGB (tipo Grande "BIG")
-
3 LEDs RGB SMD (Dispositivos de
Montaje Superficial "Surface Mount Device")
-
1 Zumbador
-
2 Motores con reductora
-
3 Salidas PWM
-
1 ranura para acoplar un Sensor
de Ultrasonidos
-
2 Conjuntos Emisor/Receptor de
infrarrojos (bajo el chasis) para detectar una Línea
-
1 Emisor / Receptor de iR
(infra-Rojos) sobre el chasis
9.2 CARGA DE
LIBRERÍAS PARA PROGRAMAR EL DG-CAT
Para poder manejar el Robot DG-Cat
desde MakeCode es necesario importar unos archivos denominados "Librerías".
Puedes descargar las librerías desde el enlace de
más abajo, pinchando con el botón derecho del ratón y escogiendo en el
menú "guardar enlace como..."
o desde el móvil, dejando el dedo pulsado sobre el enlace y escogiendo "Descargar enlace":
Accede ahora a MakeCode y
en la página inicial pulsa sobre el icono "Importar" 
En la ventana siguiente elige "Importar Archivo"
para cargarlo desde tu dispositivo:

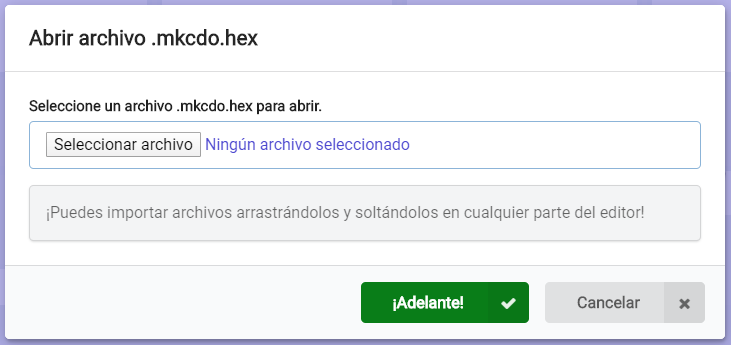
Busca
en tu dispositivo el archivo descargado y pulsa ¡Adelante!
cuando lo hayas cargado (Go Ahead! en
inglés):
Si todo ha salido
correctamente, al abrirse la pantalla de MakeCode observarás algunos
iconos nuevos, entre los que se encuentra Mbit_Robot
que incluye
bloques para controlar varios elementos del Robot:
9.3 OTRA FORMA DE AÑADIR EXTENSIONES
Si se te ha olvidado hacerlo en
la pantalla de inicio. también puedes importar las librerías desde el
proyecto actual, pinchando en el icono "+
Extensiones"
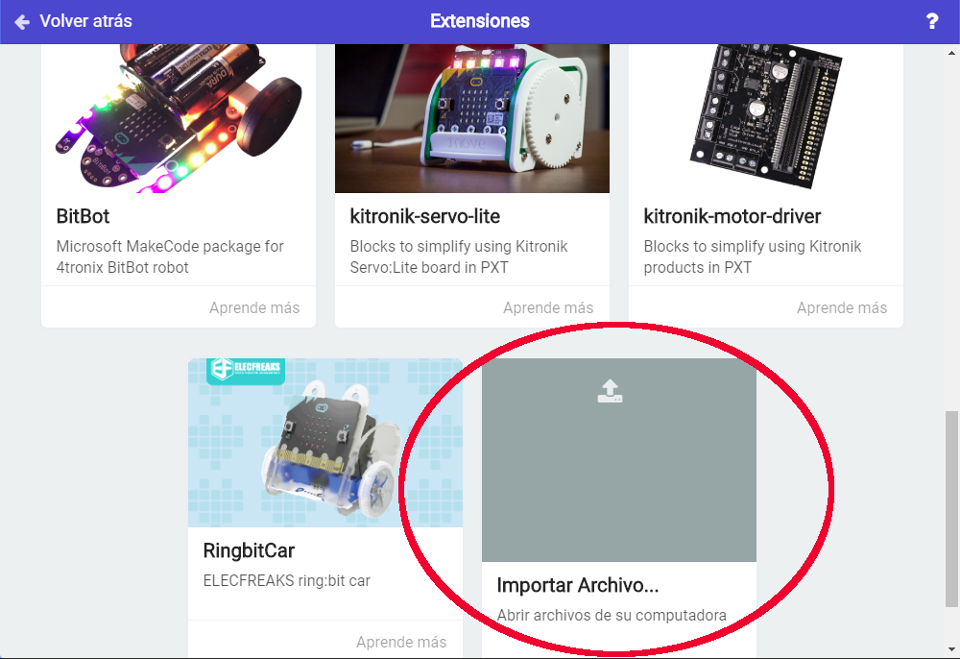
Allí verás distintos dispositivos que
pueden controlarse con micro:bit y al final una opción para Importar la
librería correspondiente a DG-Cat
Al terminar verás los nuevos
bloques instalados en MakeCode, incluido Mbit_Robot
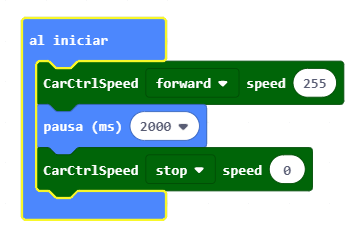
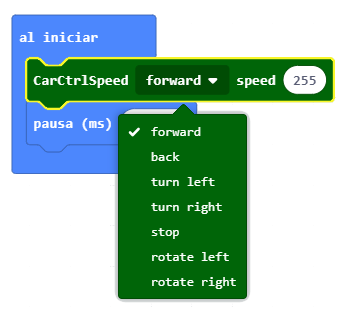
9.4 SECUENCIA BÁSICA DE AVANCE Y PARO AL INICIAR
Una vez cargada la
extensión (librerías) de DG-Cat haremos una prueba para comprobar que
el robot se mueve.
Replica este programa para hacer que, al conectar el
interruptor, el robot avance durante 2 segundos y luego se pare:
9.5 RESUMEN: CARGA DE
LIBRERÍAS PARA DG-CAT Y PROGRAMACIÓN DE UNA SECUENCIA BÁSICA

En el vídeo siguiente
puedes ver todo el proceso tratado en este apartado: